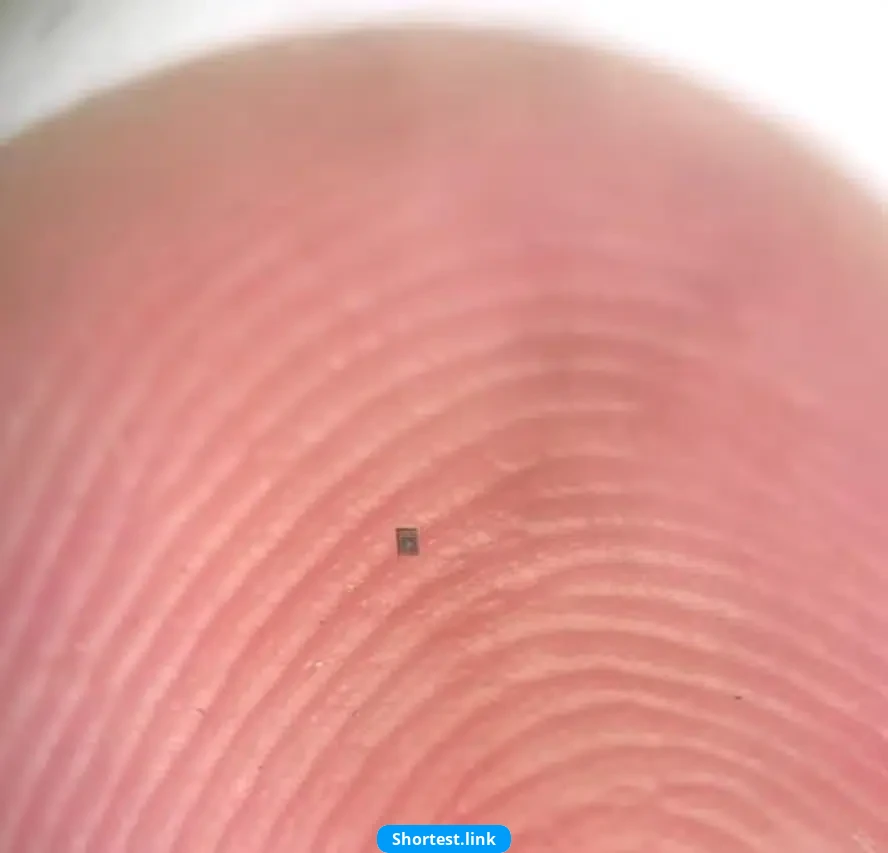
の研究者 ペンシルベニア大学 そして ミシガン大学 (米国) を開発しました これまでに作られた最小の自律ロボット。これらのマイクロロボットは非常に小さいので、 肉眼では完全に見えない。
📏 サイズ詳細:
- 身長: 200~300マイクロメートル
- 幅: ~50マイクロメートル
- 十分小さい 人間の指紋の尾根上のバランス
極度の小型化にもかかわらず、これらのロボットは 完全に機能するシステム。それぞれには次のものが含まれます。
- 🧠内部処理
- 👀 センサー
- ⚡ 推進システム
- 🔋 それ 独自の電源
他のマイクロスケールデバイスとは異なり、これらのロボットは 必要ありません:
- ワイヤー
- 外部バッテリー
- 磁場
- リモコン
彼らです 本当に自律的な。
☀️ 太陽エネルギーと長期的な自律性
自律的な動作を実現するのは、 極小のソーラーパネル ロボットの構造に直接埋め込まれています。
🔋 エネルギー特性:
- 発電量: ~75ナノワット
- 動作寿命: 月、充電せずに
- を通じて達成 超低電力電子回路
💰 製作費:
- 約 1 ユニットあたり 0.01 ドル
この超低コストにより製造が現実的になります。 何百、あるいは何千ものマイクロロボットが同時に、将来の大規模アプリケーションの重要な要件です。
⏳数十年を要した科学的挑戦
過去数十年でエレクトロニクスは急速に小型化しましたが、 ロボット工学は大きなボトルネックに直面していた:
👉 作成中 1ミリメートル未満の自律機械。
この課題はほとんど未解決のままでした ほぼ40年。
🔬 顕微鏡スケールでは:
- 重力と慣性が無視できるようになる
- 粘度と流体抵抗が支配的
- 伝統的な機構(車輪、脚、関節) もう働かない
物理の法則を簡単に言うと、 変化。
⚡ 電界を使用した移動 (可動部品なし!)
これを解決するために、科学者たちは 機械部品を一切使用しない推進システム。
🧪 仕組み:
- ロボットが生成する 電場
- これらの場は周囲の液体内のイオンを移動させます
- 結果として生じる流体の流れ ロボットを前に押し出す
🌊 これにより、マイクロロボットは次のことが可能になります。
- 微小な環境を「泳ぐ」
- 正確かつ効率的に動く
- で活動する 調整されたグループ、魚の群れに似ています🐟
🚀 パフォーマンス:
- 速度: まで 1 秒あたり 1 体の長さ
- 可動部品がないため非常に耐久性が高い
🧠 コンピューティングとソフトウェアの極度の小型化
自律性は、次のいくつかによって可能になります。 これまでに作られた最小のコンピューターによって開発されました。 ミシガン大学。
⚙️ 主な革新:
- での操作 超低電圧
- プログラムの保存方法と実行方法の根本的な再設計
- 複雑な命令を圧縮 最小限のコマンドセット
- と完全に互換性があります 微視的なメモリの限界
これは必須です コンピューターアーキテクチャを根本から再考する。
🌡️ センサーと「ダンスベースの」コミュニケーション
各マイクロロボットが計測できるのは、 温度変化 驚くべき精度で。
📡 センサー機能:
- 精度: まで ±0.33℃
- 暖かい地域に移動したり、温度変化を監視したりできます
💃 データの送信方法:
- ロボットが実行するのは、 特定の一連の動き
- この「ミクロのダンス」は情報を暗号化する
- 科学者は顕微鏡とカメラを使用してデータを解読します
🐝 このコミュニケーション方法は以下からインスピレーションを得ています。 ミツバチはどのように情報を共有するのか 動きを通して。
🚀 医療と産業における将来の応用
研究者らによると、これは単なる 初代 テクノロジーの。
🔮 将来のバージョンには次のものが含まれる可能性があります。
- 追加のセンサー
- より複雑なオンボード プログラム
- より過酷で複雑な環境での運用
🌍 潜在的な用途
| 分野 | 使用事例 |
|---|---|
| 🧬 生物学 | 個々の細胞のモニタリング |
| 🏥薬 | マイクロスケール診断 |
| 🏗️エンジニアリング | 微細構造の検査 |
| 🏭業界 | 超小型デバイスの製造 |
🏁 最終的な考え
このブレークスルーにより、 全く新しい技術基盤。関係する科学者にとって、これらのマイクロロボットは、これまで使用されていなかったアプリケーションへの扉を開きます。 純粋なSF —そして多くの可能性がまだ発見されるのを待っています🌟。
Leave a Reply